
The LSM303 3D Accelerometers/Magnetometer Models are a system-in-package featuring a 3D digital linear acceleration sensor and a 3D digital magnetic sensor. These best-in-class eCompass devices enable superior PDR or unique use cases in emerging applications, including drones and personal navigation systems.
All full-scales available are fully selectable by the user. The device includes an I2C serial bus interface that supports standard and fast mode 100kHz and 400kHz.
Features
|
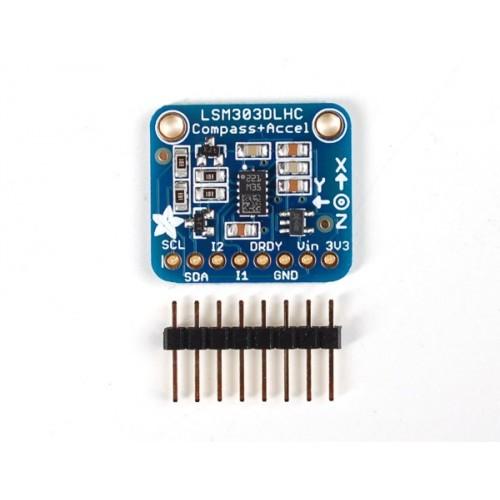
Here is a picture of the module I bought
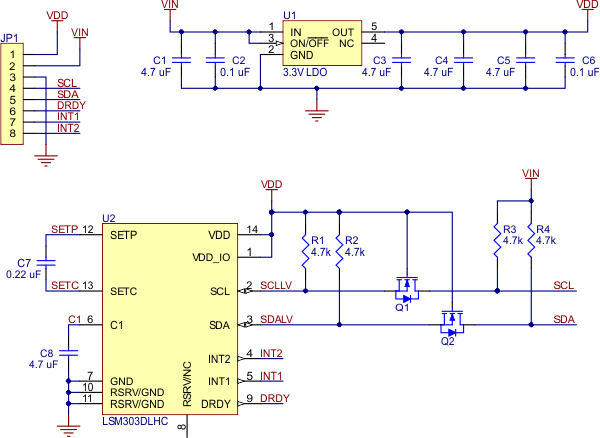
This is a schematic of a typical module such as the one above
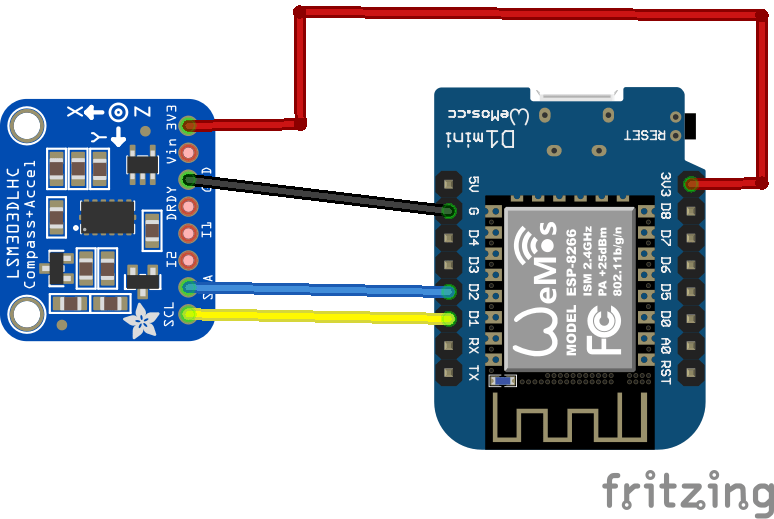
Now lets look at a layout showing how to connect the module to our Wemos Mini
Parts List
Here are the parts I used
| Name | Links | |
| Wemos Mini | ||
| LSM303 | ||
| Connecting cables |
Schematic and layout
Quite a straightforward connection being an I2C device, here is what you need to connect
Code
You need to import the https://github.com/pololu/lsm303-arduino library, this is the example code
#include <Wire.h>
#include <LSM303.h>
LSM303 compass;
char report[80];
void setup()
{
Serial.begin(9600);
Wire.begin();
compass.init();
compass.enableDefault();
}
void loop()
{
compass.read();
snprintf(report, sizeof(report), "A: %6d %6d %6d M: %6d %6d %6d",
compass.a.x, compass.a.y, compass.a.z,
compass.m.x, compass.m.y, compass.m.z);
Serial.println(report);
delay(500);
}
Testing
Open the Serial Monitor window and you should see something like this, move rthe module about to see the values change
A: 11760 -10560 -3648 M: -177 599 341
A: 8192 -256 -12224 M: -290 155 512
A: -6352 -2288 592 M: -240 609 133
A: 13424 3312 -9952 M: -458 168 343
A: 8848 -816 -9088 M: -398 152 431
A: 11104 4848 -7776 M: -457 75 355
A: 12896 6992 -7104 M: -465 60 348
A: 12720 7152 -6960 M: -462 53 348
A: 12752 7312 -6784 M: -459 48 343
A: 12800 7408 -6656 M: -459 44 342
A: 12816 7472 -6592 M: -464 41 337
A: 12864 7616 -6496 M: -466 36 337
A: 12896 7680 -6416 M: -464 35 336
A: 12864 7712 -6272 M: -465 34 333

{kind=link}