
In this example we will show a basic stepper motor example, we use a driver board that can be bought on many sites which basically comprises of a ULN2003 IC and a few other components, you can use either 5v or 12v, the motor that comes quite often with this board is a 5v type, you can see it further down the page.
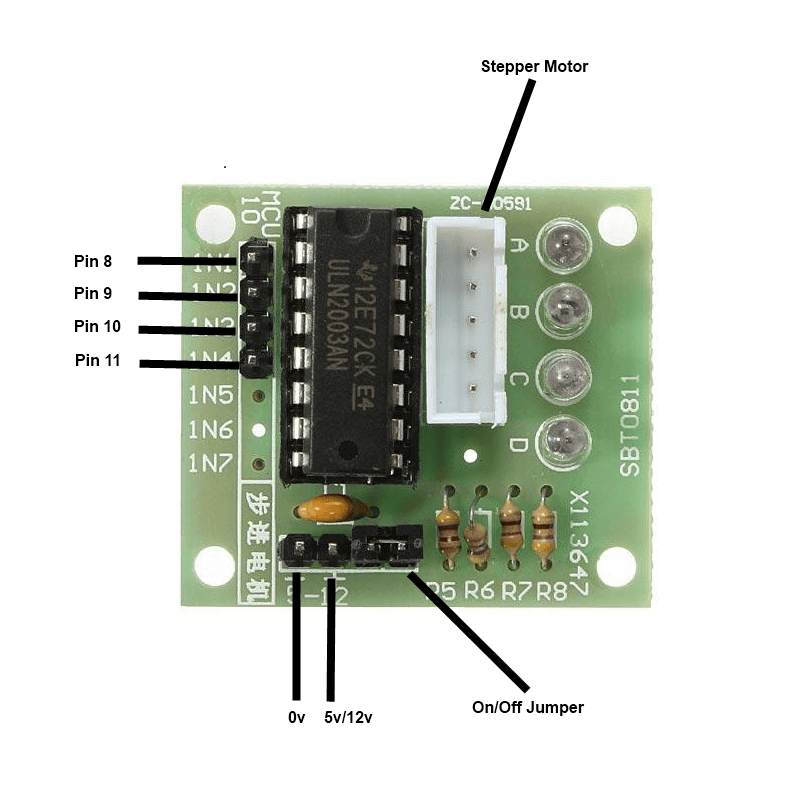
Here is the board that I used for this example and here are the connections
Wemos D5 -> IN1
Wemos D6 -> IN2
Wemos D7 ->IN3
Wemos D8 -> IN4
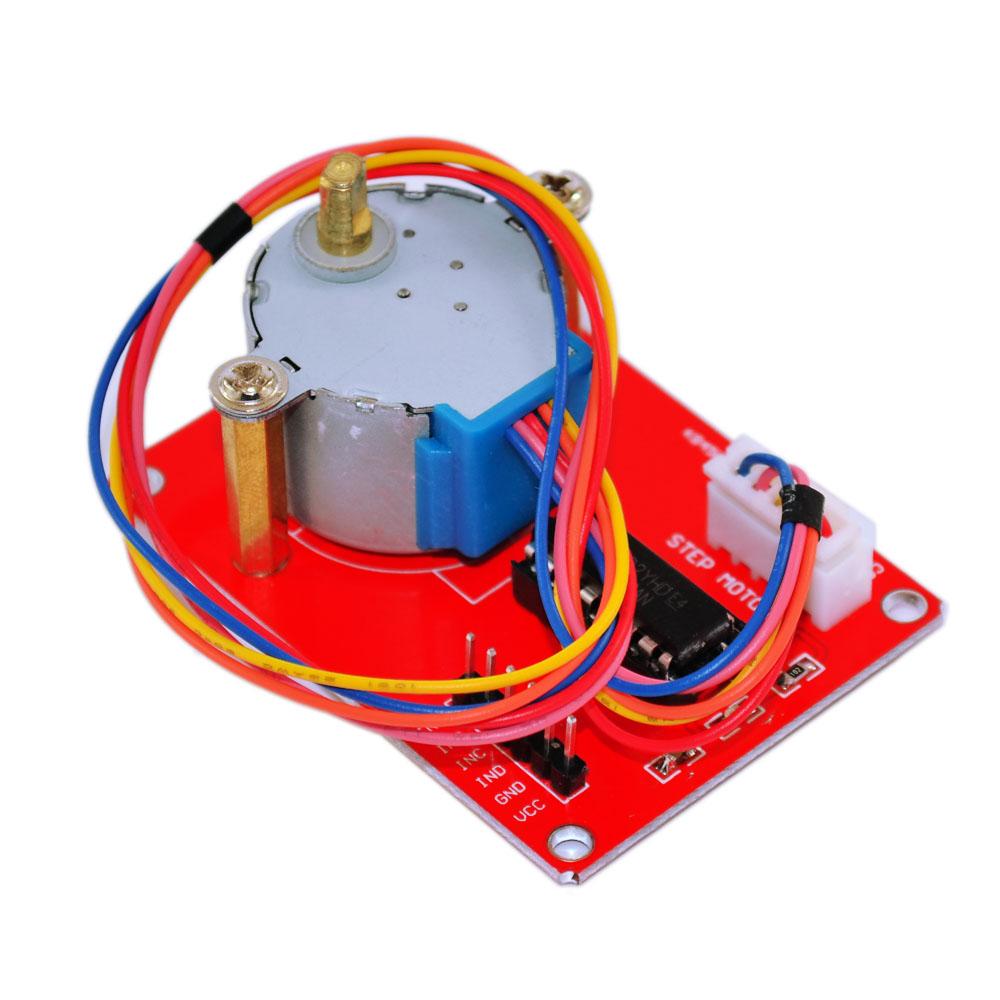
Diameter: 28mm; Voltage: 5V; Step angles: 5.625 x 1/64; Speed reduction ratio: 1/64; Power consumption: About 5V / 63mA; Load pull in frequency: >500Hz; Load pull out frequency: > 900Hz; 5-wire 4-phase can be driven with an ordinary ULN2003A chip
I powered the module externally
There are other similar boards where the motor is separate from the board but its the same stepper motor and it uses a ULN2003
Code
The code uses the built in stepper library, this is a fairly basic example
[codesyntax lang=”cpp”]
#include <Stepper.h>
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// initialize the stepper library on pins D5 to D8
Stepper myStepper(stepsPerRevolution, D5,D6,D7,D8);
int stepCount = 0; // number of steps the motor has taken
void setup() {
}
void loop() {
// step one step:
myStepper.step(1);
stepCount++;
delay(100);
}
[/codesyntax]
Links
5V 4-phase Stepper Motor+ Driver Board ULN2003

WHAT DOES THIS CODE ACTUALL DO.CORRECT ME IF IM WRONG BUT THE INITIAL STEP COUNT IS 0 AND THE LOOP IS THERE ALSO STEPCOUNT IS ++ SO MOTOR WILL ROTATE CONTINOUSLY