
The MPU-6500 is the company’s second-generation 6-axis Motion Tracking device for smartphones, tablets, wearable sensors, and other consumer markets.
The MPU-6500, delivered in a 3 mm x 3 mm x 0.9 mm QFN package, addresses the market requirements for high-performance applications such as pedestrian navigation, context-aware advertising, and other location-based services.
The device also supports the specifications for emerging wearable sensor applications, such as remote health monitoring, sports and fitness tracking, and other consumer applications.

Features
Digital-output of 6-axis MotionFusion data.
9-axis fused data from Motion Processing Library
Tri-Axis angular rate sensor (gyro) with a sensitivity up to 131 LSBs/dps and a full-scale range of ±250, ±500, ±1000, and ±2000dps
Tri-Axis accelerometer with a programmable full scale range of ±2g, ±4g, ±8g and ±16g
Reduced settling effects and sensor drift by elimination of board-level cross-axis alignment errors between accelerometers and gyroscopes
Digital Motion Processing™ (DMP™) engine offloads complex MotionFusion, sensor timing synchronization and gesture detection
MotionApps™ Platform support for Android, Linux, and Windows
Embedded algorithms for run-time bias and compass calibration
Digital-output temperature sensor
Digital input on FSYNC pin to support video Electronic Image Stabilization
Programmable interrupt supports gesture recognition, panning, zooming, scrolling, tap detection, and shake detection
VDD Supply voltage range of 1.71V–3.6V
Gyro operating current: 3.2mA (full power, gyro at all rates)
Gyro + Accel operating current: 3.4mA (full power, gyro at all rates, accel at 1kHz sample rate)
Accel low power mode operating currents: 18.65µA at 31.25Hz
Full Chip Idle Mode Supply Current: 6µA
400kHz Fast Mode I²C or up to 20MHz SPI serial host interfaces
10,000g shock tolerant
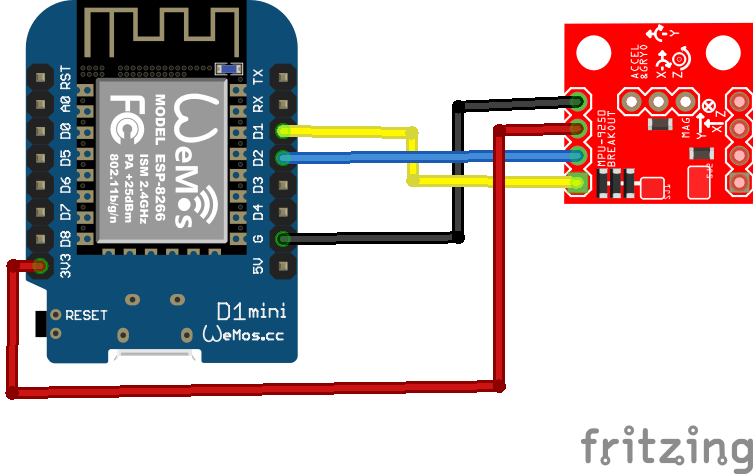
Layout
Code
I found a library here that seemed to work ok – http://www.uctronics.com/download/U3635_MPU6500.zip
[codesyntax lang=”cpp”]
// Arduino Wire library is required if I2Cdev I2CDEV_ARDUINO_WIRE implementation
// is used in I2Cdev.h
#include "Wire.h"
// I2Cdev and MPU6050 must be installed as libraries, or else the .cpp/.h files
// for both classes must be in the include path of your project
#include "I2Cdev.h"
#include "MPU6050.h"
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 accelgyro;
int16_t ax, ay, az;
int16_t gx, gy, gz;
#define LED_PIN 13
bool blinkState = false;
void setup() {
// join I2C bus (I2Cdev library doesn't do this automatically)
Wire.begin();
// initialize serial communication
// (38400 chosen because it works as well at 8MHz as it does at 16MHz, but
// it's really up to you depending on your project)
Serial.begin(38400);
// initialize device
Serial.println("Initializing I2C devices...");
accelgyro.initialize();
// verify connection
Serial.println("Testing device connections...");
Serial.println(accelgyro.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed");
// configure Arduino LED for
pinMode(LED_PIN, OUTPUT);
}
void loop() {
// read raw accel/gyro measurements from device
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
// these methods (and a few others) are also available
//accelgyro.getAcceleration(&ax, &ay, &az);
//accelgyro.getRotation(&gx, &gy, &gz);
// display tab-separated accel/gyro x/y/z values
Serial.print("a/g:\t");
Serial.print(ax); Serial.print("\t");
Serial.print(ay); Serial.print("\t");
Serial.print(az); Serial.print("\t");
Serial.print(gx); Serial.print("\t");
Serial.print(gy); Serial.print("\t");
Serial.println(gz);
// blink LED to indicate activity
blinkState = !blinkState;
digitalWrite(LED_PIN, blinkState);
}
[/codesyntax]
Output
Open the serial monitor
a/g: -280 -10732 -7336 32767 18392 -32768
a/g: 1620 -9008 -5564 32767 16477 -32768
a/g: 4368 -10656 -4060 32767 15867 -32768
a/g: 7724 -9952 -832 32767 14362 -32768
a/g: 6512 -6872 -340 32767 19106 -32768
a/g: 13252 -12072 3184 32767 20260 -32768
a/g: 15236 -12164 4784 32767 16474 -32768
a/g: 13152 -12644 2924 32767 10330 -32768
a/g: 16376 -11592 4708 31548 6686 -32768
a/g: 15676 -10160 4612 28194 3577 -32768
a/g: 15320 -10376 4480 25826 63 -32768
a/g: 17024 -9380 5472 25643 -483 -32768
a/g: 12064 -8728 4524 25102 -2927 -32768
a/g: 13240 -7600 5172 21817 -4007 -32768
Link
https://www.invensense.com/wp-content/uploads/2015/02/MPU-6500-Datasheet2.pdf
